一般的には、それぞれの車両システムを個別に開発するので、プロトタイプ制作後に初めて、システムと併せて検討を行い、試験を実施し、最終的に可能な限り相互に調整を行います。
よって、電動化車両やソフトウェア定義型自動車では、開発プロセスを変更する必要があります。機能数が増えるにつれて、電力を消費する機能やソフトウェア機能の数も増えます。システムが相互に影響を及ぼす仕組みについてだけでなく、相互に補完し合う仕組みについても課題が生じており、自動車産業がこのような課題に対処する必要があるのは明らかでしょう。

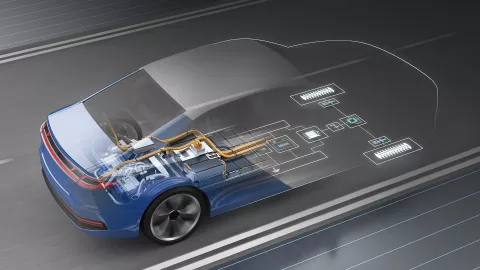
ソフトウェアで制御される機能が増えれば、安全性、効率性、性能などが向上します。交差効果も増大しており、それにより車両はますます複雑化しています。
特にeモビリティでは、個々のシステム間での相互依存性を綿密に解析する必要があり、激しい競争により、その必要性はさらに増しています。さらに、絶えず増大する需要により開発期間はますます短縮化し、イノベーションの重要性が最も叫ばれています。
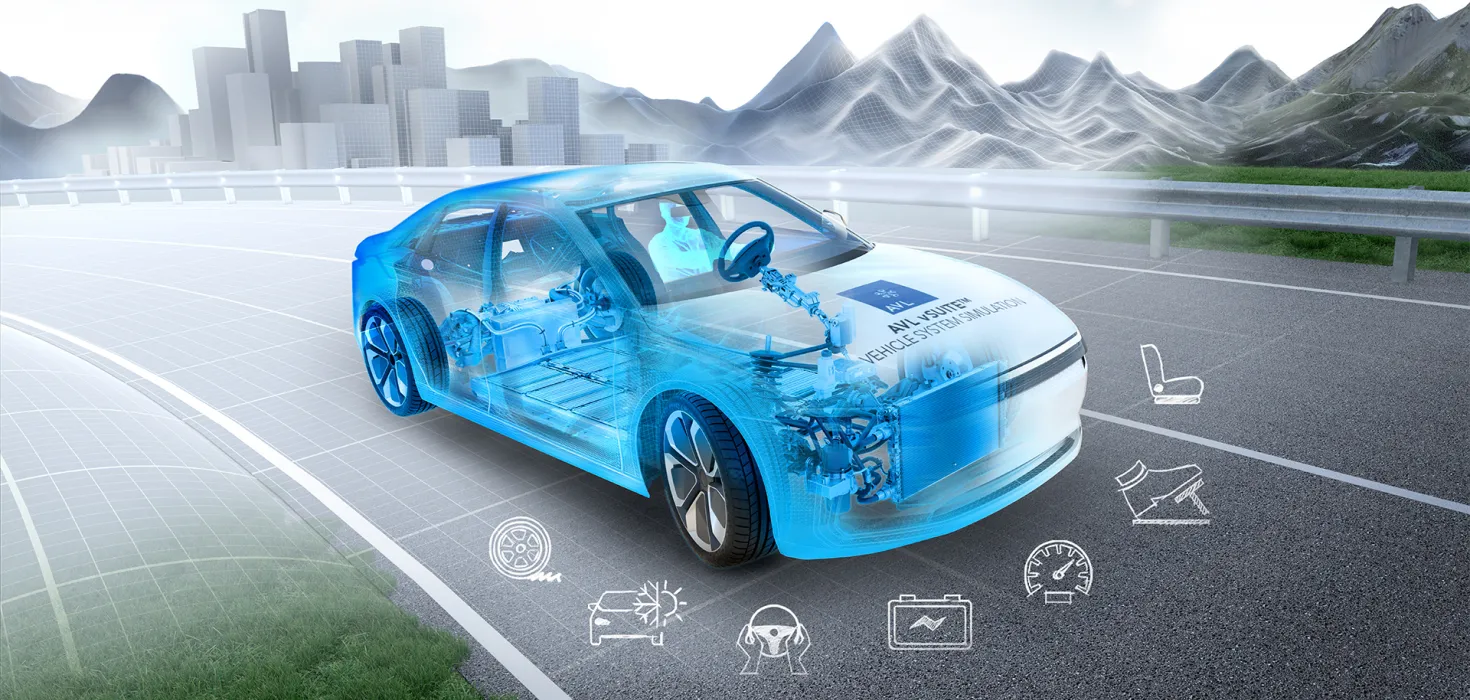
従来の開発プロセスでは、これらの課題すべてを効率的に克服することは困難です。車両全体のレベルを確認することで、エネルギー消費量、航続距離、走行特性などの多くの場合で相反する目標を同時に最適化できます。
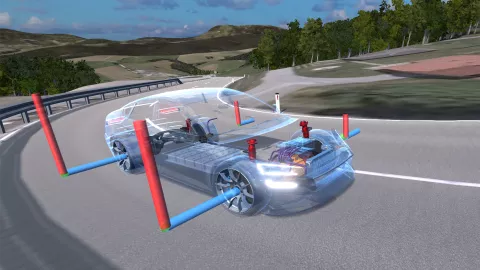
バーチャルツインは、これらすべての車両特性をリアルに表現し、あらゆる開発フェーズで使用でき、それぞれの環境を取り込むことができます。これにより、実際のプロトタイプにかかる労力を軽減しながら、開発を加速できます。

- シミュレーションの使用を増やすことで開発時間を短縮 - 研究、モデル化、シミュレーション、最適化を同時に実行
- 個々のシステムをまとめて全体的に確認することで、快適性や性能などの車両属性に関する目標の相反を回避
- 開発期間の短縮とプロトタイプの削減により、コストを削減
- 車両モデルファクトリーからのデータでモデルの妥当性確認を実施し、データに基づいた意志決定を実行
モビリティ革命が本格化しています。この革命は、持続可能性を高めた、新たな推進システムの開発だけにとどまるものではありません。むしろ、開発プロセス全体が激変しています。その変化を主導しているのは、シミュレーションです。
現時点では、設計プロセスとエンジニアの限界を押し上げることについて、完成車メーカーやサプライヤーを含むどの企業も直面する課題を理解することが重要です。さまざまなシステムが増えるにつれて、部門やチームの構造も変化しています。AVLは、その変化を把握しています。AVLはソフトウェア開発者たちだけで成り立つ企業ではないため、こうした変化のプロセスについても経験があります。AVLにはエンジニアたちも在籍しており、同時に彼らはユーザーでもあります。ソフトウェアやプロジェクトにおける直感的なワークフロー、ジェネレーター、操作ガイド機能、評価には、こうしたさまざまな視点から得られたAVLの知識を活かしています。
