転がり軸受 - クリアランス領域の減衰
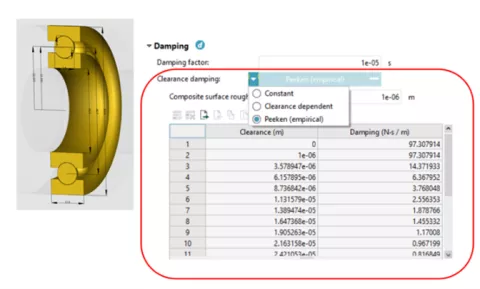
転がり軸受では、現在適用されているアプローチでは、材料接触が減衰の主要因である一方で、クリアランス領域で予想される減衰は考慮されていません。クリアランス領域での軸受挙動を安定させるため、個々の接点におけるギャップ領域で別の減衰力が作用しています。必要な減衰係数が接点の接近距離に応じて表で規定されています。
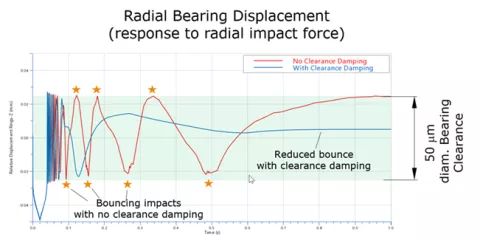
次のグラフは、軸受衝撃荷重への反応としての軸受の半径変位を示しています。クリアランス減衰のない軸受は半径方向の遊びの範囲内で繰り返し揺れが発生するのに対し、クリアランス減衰のある軸受ではより滑らかな減衰が特徴となっています。
スプライン・ギアジョイントの偏差/公差入力データ
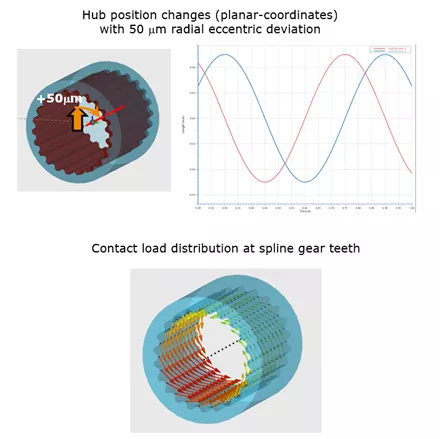
図面寸法公称値からの幾何偏差は、トランスミッションと電気駆動ユニットのNVH性能に大きな影響を与える可能性があります。コンポーネントの偏心を生じさせる偏差を考慮するため、スプライン・ギアジョイントが拡張され、接続部のボディ-スプラインプロファイルを定義するシャフト/ハブリンクの位置で提供される軸、半径、角度の偏差入力データを処理できるようになりました。この図は、シャフト回転軸に対する外側スプラインプロファイルの半径方向における偏位の影響を示しています。ラジアルハブの動きは、シャフト-スプラインの振れを追従し、スプライン-ギアの境界面における半径方向力の変動に関連する周期的な位置変化をもたらします。
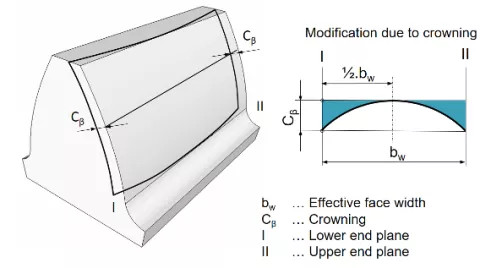
スプラインギア:マイクロジオメトリーによるクラウニング
特定のスプラインギア使用例では、シャフト間にトルクだけを伝達し、曲げモーメントを伝達しないことが非常に重要です。これは、ギア幅のフランク面にクラウニング修正を施すことで実現できます。スプラインギア接点の外側(シャフト)と内側(ハブ)でクラウニングを指定できるようになっています。この修正は3DビューアーとAVL IMPRESS™ Mで表示できます。
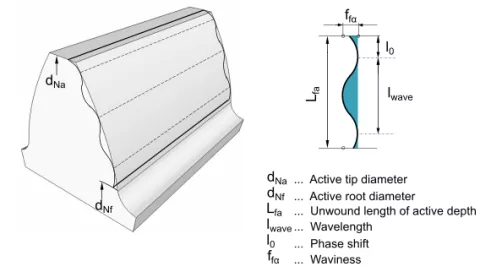
円筒歯車:フランク面のうねり修正
歯車研削工程における製造により、フランク面にさまざまな欠陥が生じます。その欠陥は、歯車のノイズに著しい影響を及ぼす可能性があります。顕著な逸脱パターンの1つは、うねりと呼ばれています。円筒歯車ではギアの歯のうねりを特定できるようになっており、接触モデルでうねりが考慮されます。
歯当たりにおける局所的な歯車本体ノードのたわみを考慮する新手法(ベータ版)
Advanced Cylindrical Gear Jointでは、歯元の円周ノードから歯車本体のたわみを考慮できるようになっています。ただし、適用されているマッピング手法は、歯間ごとの接触荷重分布には十分に反映されない、歯車本体のたわみ形状(有名な「ポテトチップ」モードなど)の原因となる平均化を実施します。歯車の接触によって影響を受ける本体のたわみを考慮した新しいマッピング手法がオプションで実装されています。このオプションを使用すると、局所本体モードがより一層リアルな方法で歯車接触パターンの展開に影響を及ぼします。
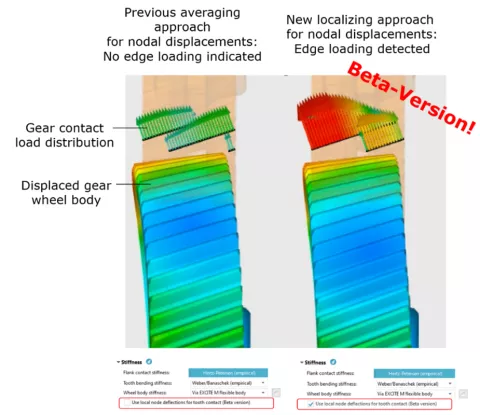
新しい手法は、フランク面接触による動的損失が発生しやすく、時間領域解の数値的不安定性に影響を受けやすくなっています。そのため、2023 R1ではこの機能をベータ版としてリリースしました。この機能を有効にするには、ACYG [ジョイントプロパティ | 剛性]で[歯当たりに局所ノードのたわみを使用する(ベータ版)]チェックボックスを選択します。
パルス幅変調器
パルス幅変調(PWM)は電流制御器が計算した可変振幅と可変周波数電圧要求を実現します。このパルスはインバーターのスイッチを制御します。パルス電圧は、電気モーターの固定子に作用するフォースとトルクにかなり高い高調波を導入するため、eモーターのNVH性能に寄与します。AVL EXCITE™ Mは、PWM戦略、過変調、一定のスイッチング周波数または速度に依存するスイッチング周波数の使用、または図に示すランダムスイッチング周波数の帯域に関して、同調励起を回避するPWMの効果を調査できるようになっています。

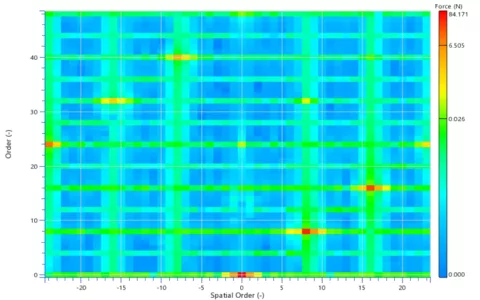
eモーターの歯の力に対する次数解析
電気モーターの固定子歯の力励振は、回転方向と反対方向に伝播する波により最もよく描写されます。磁場の非線形性により、基本周波数と調和周波数で空間波数が発生します。空間波の振幅と位相を解析することで、音響解析向けの貴重な指標となります。2D次数解析は、固定子の円周方向リンク位置を持つすべての電気モーターモデル向けに提供されています。各リンクセクションは個別に評価されるため、回転子のスキュー、偏心、傾斜の影響を調査できます。パルス幅変調の影響も狭帯域解析で把握できます。
新しい汎用速度制御器
新しい速度制御器コンポーネントがAVL EXCITE™ Mに導入されています。この速度制御器は、Electric Machine Controller内部の速度制御器に置き換わるものですが、他の使用例向けに汎用スタンドアロンコンポーネントとしても利用できます。この速度制御器はPI制御器です。制御器ゲインと初期状態は、制御パラメーター(立ち上がり時間とオーバーシュート率)とモデル固有のパラメーター(有効慣性モーメントと有効回転減衰)に基づいて、ユーザー定義での計算または自動計算により求めることができます。
この制御器は、コンパイル済みの関数コンポーネントの特殊なバージョンとして実装されます。このアプローチにより、速度制御器を通常のコンパイルされた関数コンポーネントに変換して、信号やパラメーター、あるいは実際の制御器コードを変更するなどのカスタム変更を行うこともできます。

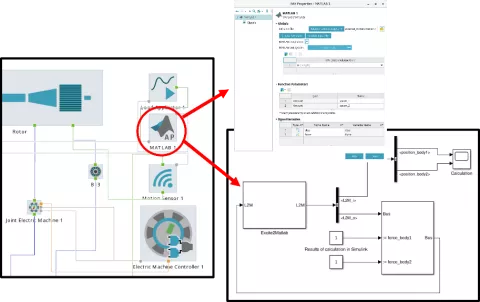
ダイレクトMATLAB®インターフェース
MATLAB®インターフェースコンポーネントを利用すれば、AVL EXCITE™ MとMATLAB®/Simulink®とのコシミュレーションが可能です。このインターフェースは信号ネットワークに完全に統合されています。センサー、機能(コンパイルされた関数、テーブルなど)、荷重アプリケーターなどのインターフェースに接続できます。入・出力信号は、任意の物理量およびSimulink®モデル向け追加パラメーターに対して定義できます。現在、R2021bまでのMATLAB®バージョンがサポートされています。

マップベースの空気軸受ジョイント
空気軸受は、ターボ機械や燃料電池で一般的に使用されるため、軸・半径両方向の空気軸受をシミュレートするシンプルな方法が必要です。次の図に示すように、軸受番号に対して正規化剛性と正規化減衰をプロットした軸受マップをこの目的のための入力データとして使用できます。
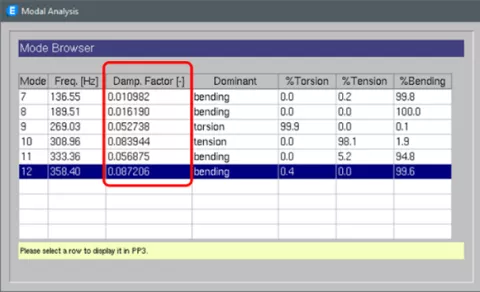
AVL EXCITE™ Designerにおけるクランクシャフトとローターの減衰モーダル解析
AVL EXCITE™ Designerでは、減衰モーダル解析がシャフトモデラーに機能拡張され、クランクシャフトとプレーンシャフト(回転子など)に対応しています。ねじり振動ダンパー、主軸受、クランクシャフト構造の減衰を考慮して、自由状態または弾性的に支持されたクランクシャフトの減衰モーダル解析を実施できます。
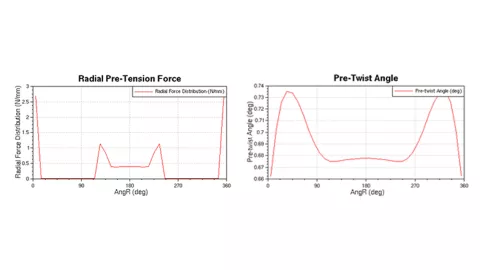
AVL EXCITE™ Piston&Ringsのリングアセンブリによるリング予荷重の計算
リングアセンブリの変形によるリングの予荷重条件の計算は、困難となる場合や時間がかかる場合があります。多くの場合、リング開放形状のみが知られています。この場合、リング適合性ワークフローでは、リング開放形状を考慮して線形形状に適合させることで、リング予荷重条件を計算できます。適合性の計算により、リング径方向の予張力と予ねじり角度に関する結果が得られます。
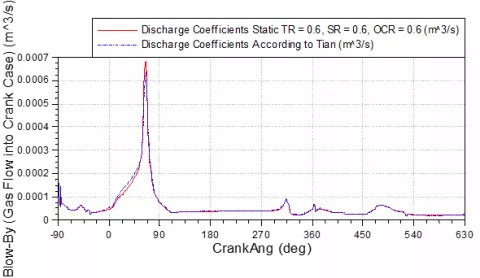
リングエンドギャップの解析的ガス流量係数
ガス流量係数のキャリブレーションには非常に時間がかかり、望ましい結果を得るために何度も繰り返さなければならない可能性があります。ガス流量係数は通常、物理的な試験に対するキャリブレーションによって得られる静的な値です。物理的な試験結果が存在しない現状を踏まえると、水素などの新型燃料エンジン開発時に困難となる場合があります。リングエンドギャップでの新たなガス流解析手法はTianの研究に基づいており、水素、ガソリン、ディーゼルの各種エンジンに適用できます。
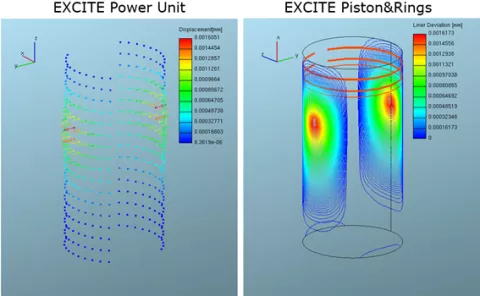
AVL EXCITE™ Power UnitからAVL EXCITE™ Piston&Ringsへの線形変形マップ
AVL EXCITE™ Power Unitでピストン動態解析を実施すると、ピストンスラップによる線形変形が考慮されます。一方、AVL EXCITE™ Piston&Ringsでは、ピストンとライナーの接触による線形変形は考慮されません。この制限により、AVL EXCITE™ Power UnitからAVL EXCITE™ Piston&Ringsにピストンの二次運動をインポートすると、ピストンが線形形状を貫通してする可能性があり、負のランド体積により精度が低下したり、シミュレーションが不安定になります。このため、AVL EXCITE™ Power Unitを介して計算された線形変形を保存し、AVL EXCITE™ Piston&Ringsにインポートできるようになりました。このマップには、線形表面全体と各結果保存ステップの線形変形値が含まれています。このワークフローは、外部ピストンの二次運動をAVL EXCITE™ Piston&Ringsにインポートする場合に使用します。
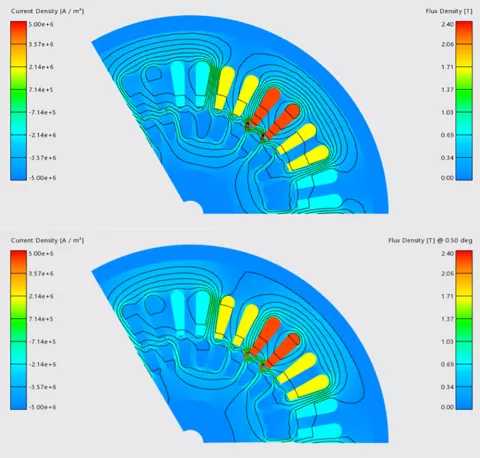
AVL E-Motor Tool™におけるインダクションモーターのマップベース(歯の力)モデル
インダクションモーターの特徴は、回転子バーにおける不均一で変化する電流密度と、電気周波数と回転子周波数とのズレによる擬似周期性です。この両方が固定子の歯の力に影響し、それによりeモーターのNVH性能に影響します。回転子バーの電流密度が変化するため、準定常運転に到達するまでに消えていくべき過渡開始フェーズを伴う過渡シミュレーションが必要です。EMTの自動ワークフローは、周波数領域で過渡磁気シミュレーションを初期化し、初期化フェーズを大幅に削減します。AVL E-Motor Tool™(EMT)には、AVL EXCITE™ Mのマップベース(歯の力)モデルをパラメーター化するインダクションモーターのワークフローがあります。
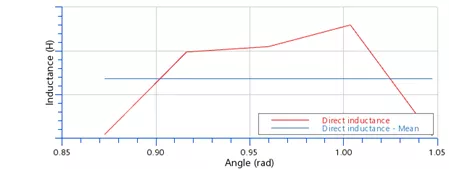
インダクタンスと電流の制御評価のアップグレード
EMTは、アンペアあたりの最大トルク(MTPA)戦略を使用して電流テーブルを評価します。基本波モデルを使用してトルクと誘導電圧を推定するには、モーターのインダクタンスが必要です。直軸インダクタンスと横軸インダクタンスは回転子の角度位置とは無関係に変化し、モデル忠実性に不確実性をもたらします。また、直交方向での永久磁石の磁束鎖交や交差カップリングインダクタンスは、特定の電流励起下では無視できない場合があります。EMTは、角度範囲のインダクタンス値をサンプリングし、標準測定と同様に位置依存値を平均化するようになっています。また、直交方向での永久磁石の磁束鎖交と交差カップリングインダクタンスが評価され、拡張基本波モデルに提供されます。
次のステップでは、EMTはMTPA戦略を適用して電流テーブルを評価します。最大トルク線は、動的解析や音響解析で最も頻繁に使用されるため、特に注意が必要です。このアルゴリズムは、ゼロトルク線に沿った正確な遷移により動作範囲の4象限すべてに対応するため、マイナス速度だけでなく発電機動作モードにも拡張されています。