Das Testen von Software für das automatisierte Fahren ist in vielerlei Hinsicht eine Herausforderung. Schließlich müssen autonome Fahrzeuge für Insassen und alle anderen Verkehrsteilnehmer gleichermaßen sicher sein. Um diese Sicherheit zu gewährleisten, ist ein enormer Testaufwand nötig. Dabei ist zu bedenken, dass bei Änderungen an der Software die Testreihen von vorne beginnen müssen. Ein solch massives Testvolumen ist mit physischen Tests und realen Prototypen einfach nicht mehr effizient zu bewältigen. Ein Paradigmenwechsel hin zur Virtualisierung ist der logische nächste Schritt.
Effiziente Testabdeckung
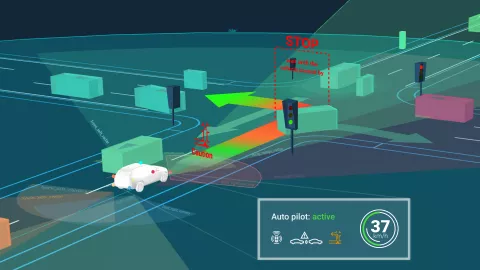
Szenariobasierte Tests konzentrieren sich auf kritische Verkehrssituationen, um die Sicherheit von ADAS/AD-Software zu validieren.
Kosten- und Zeitersparnis
Die Simulation ist kosteneffizient und kann hochgradig parallelisiert ausgeführt werden, was eine hohe Testabdeckung und schnelle Entwicklungszyklen ermöglicht, um die Zeit bis zur Markteinführung zu verkürzen, ohne das Budget zu sprengen.
Reproduzierbarkeit
Virtuelle Testszenarien können auf exakt dieselbe Weise wiederholt werden, was einen unvoreingenommenen Vergleich zwischen verschiedenen Versionen von ADAS/AD-Software ermöglicht.
Nachhaltigkeit
Reduzieren Sie Ihren ökologischen Fußabdruck, indem Sie weniger physische Prototypen verwenden.
Der typische Arbeitsablauf mit dem Scenario Simulator lässt sich in den folgenden Schritten zusammenfassen:
- Bereiten Sie einen virtuellen Prototyp für die kontinuierliche Integration der ADAS/AD-Software vor.
- Importieren Sie Testszenarien und Erstellen Sie Parametervariationen.
- Definieren Sie Post-Processing und Sicherheitsmetriken.
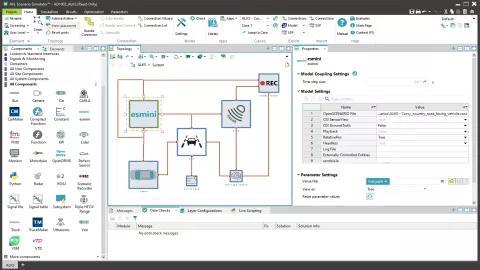
- Testen und Debuggen Sie das Simulations-Setup im "Live"-Modus.
- Führen Sie hochparallelisierte Simulationen durch - lokal oder in der Cloud.
- Überwachen und Vergleichen Sie die Durchläufe in aggregierten Dashboards.
- Analysieren Sie fehlgeschlagene Tests im Detail mit der 3d-Ergebniswiedergabe.
Zweckmäßige virtuelle Prototypen
Scenario Simulator verfügt über offene Schnittstellen zur Integration beliebiger Simulationsmodelle oder -Tools in eine Co-Simulation. Dazu gehören Ground-Truth-Sensormodelle und Hochleistungs-Fahrdynamikmodelle. ADAS/AD-Software kann über standardisierte oder kundenspezifische Schnittstellen wie FMI, ROS/ROS2, Python, TCP, UDP integriert werden. Optimieren Sie Ihre Co-Simulation mit dem integrierten Performance-Analyse-Tool für kosteneffiziente Skalierbarkeit.
Hocheffiziente Sensormodelle
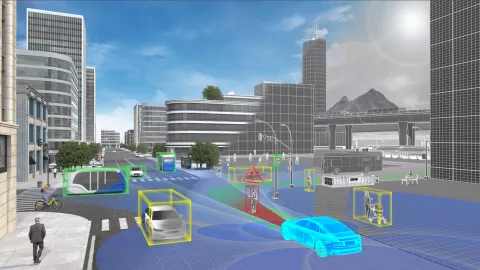
Die enthaltenen Sensormodelle sind für Trajektorienplanungs- und Regelungstests optimiert, d. h. sie unterstützen die Skalierung auf Millionen von Closed Loop-Tests, selbst mit vielen Sensoren auf einem virtuellen Prototyp. Die Sensoren wenden verschiedene Effekte direkt auf die Ground Truth des simulierten Szenarios an und benötigen daher keine teuren GPU-Ressourcen. Die verfügbaren Sensoreffekte sind geometrisch (Koordinatentransformation, Sichtfeld, Entfernung, Verdeckung), phänomenologisch (z. B. entfernungsbasierte Erkennungsrate bei schwierigen Wetterbedingungen) und statistisch (Rauschen, Geisterobjekte, falsch negative Ergebnisse, ...). Die Sensordaten sind nach dem ASAM OSI®-Standard strukturiert.
Skalierte szenariobasierte Tests basierend auf dem ASAM OpenSCENARIO® Standard
Dank der hervorragenden Unterstützung des ASAM OpenSCENARIO®-Standards kann der Scenario Simulator Testdefinitionen aus verschiedenen Quellen importieren und erlaubt dem Benutzer die Konfiguration von Parametervariationen. Die Simulationen laufen parallelisiert auf Workstations und können auf viele Arbeitsplätze in einer Kubernetes-Cloud-Umgebung skaliert werden - unterstützt durch ein leistungsstarkes Parameter- und Test-Case-Management.
Ergebnisanalyse auf zwei Ebenen - vom Dashboard bis zur 3D-Analyse
Die Ergebnisanalyse findet auf zwei Ebenen statt. Die Laufhistorie bietet eine zusammenfassende Übersicht über alle durchgeführten Simulationen auf der Grundlage von Testparametern und KPIs/Sicherheitsmetriken, die einen schnellen Vergleich verschiedener ADAS/AD-Softwareversionen auf hoher Ebene ermöglichen. Sie ermöglicht auch das Clustern und Filtern von fehlgeschlagenen Tests für eine effiziente Detailanalyse einzelner Tests. Die Funktion Scenario Replay ermöglicht eine 3D-Wiedergabe von aufgezeichneten ASAM OSI®-Daten sowie von Zeitreihendaten. Dies ermöglicht die Analyse aus allen Blickwinkeln und verschiedenen Sensordatenströmen, um die genaue Ursache eines fehlgeschlagenen Tests zu untersuchen und liefert wichtige Debugging-Informationen für die ADAS/AD-Entwickler. Auf der Grundlage dieser Informationen können sie die nächste Version der ADAS/AD-Software verbessern.
Wie wird das Fahrzeug der Zukunft aussehen? Es wird in irgendeiner Form elektrifiziert sein, das ist sicher. Vor allem aber wird es mit einer Vielzahl an fortschrittlichen Fahrerassistenzsystemen (ADAS) ausgestattet sein und der Fahrer wird sich mithilfe autonomen Fahrens (AD) vollständig auf das Fahrzeug verlassen können.
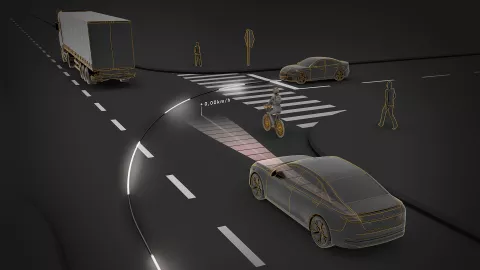
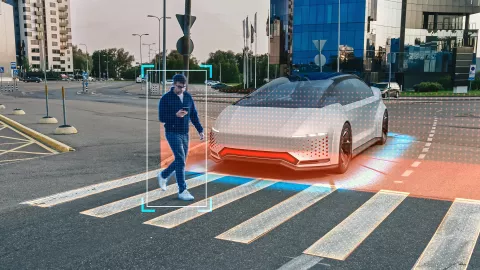
Wie können Sie überprüfen, ob eine automatisierte Fahrfunktion in allen Situationen sicher ist? Um diese Frage mit Sicherheit zu beantworten, wären Milliarden von gefahrenen Testkilometern erforderlich. Eine effiziente und nachhaltige Lösung ist Szenario-basiertes Testen.
SCENIUS bietet einen ganzheitlichen Lösungsansatz für die szenarienbasierte Absicherung von ADAS- und AD-Systemen.
Der neue AVL Scenario Simulator™ ist eine kostenoptimierte Lösung für vollautomatische, groß angelegte ADAS/AD-Tests. Erstellen Sie für jeden Testzweck den optimalen virtuellen Prototyp.