5 Gründe, warum PreonLab die ideale Software für die Simulation von Fahrzeugverschmutzung ist

In PreonLab dreht sich alles um Partikel. Es basiert auf der Smoothed-Particle-Hydrodynamics-Methode: einer gitterfreien, partikelbasierten Simulationsmethode. Aufgrund des rein Lagrange'schen Ansatzes ist ein Vernetzen, wie es bei herkömmlichen gitterbasierten CFD-Methoden üblich ist, nicht erforderlich. Dadurch lässt sich ein erheblicher Teil der Zeit und des Aufwands beim Simulationsaufbau einsparen. Darüber hinaus ist das Herzstück der revolutionären PREON-Technologie von PreonLab ein hochfunktionaler impliziter Löser, der große Zeitschritte (CFL 1), schnelle Berechnungen pro Zeitschritt und eine adaptive Partikelauflösung ermöglicht, ohne dabei die Stabilität zu beeinträchtigen. Zusätzlich zu diesen inhärenten Leistungsvorteilen im Kern des Solvers wurde PreonLab so konzipiert, dass es eine intuitive Benutzeroberfläche, eine Fülle von einfach zu bedienenden Funktionen, sowie Multiplattformunterstützung für verschiedene Hardwaretypen bietet.
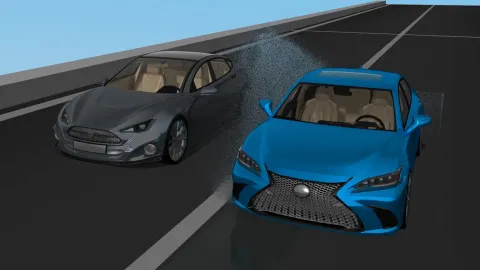
PreonLab ist für die Simulation verschiedenster Verschmutzungsanwendungen geeignet. Die Software bietet Presets für Flüssigkeiten wie Wasser und Öl sowie integrierte Voreinstellungen für verschiedene Arten von Schnee. Insbesondere Wasser und Schnee sind für Verschmutzungssimulationen besonders relevant. Video 1 zeigt eine Auswahl von Simulationsbeispielen mit Wasser und Schnee.
Video 1: Auswahl von Fahrzeugverschmutzungsanwendungen, die mit PreonLab simuliert werden können.
Zusätzlich zu den bewährten Modellen für Adhäsion und Kohäsion bietet PreonLab mit Lateral Adhesion ein zusätzliches Feature, um mehr Kontrolle über das Verhalten von Tropfen zu erhalten. Video 2 zeigt die Auswirkung von Lateral Adhesion auf das Tröpfchenverhalten und Video 3 zeigt ein Beispiel für eine Windschutzscheibensimulation mit Lateral Adhesion.
Video 2: Auswirkung des Features „Lateral Adhesion“ auf das Tröpfchenverhalten.
Video 3: Beispiel einer Windschutzscheibensimulation unter Verwendung von Lateral Adhesion.
Darüber hinaus ist es möglich, newtonsche und nicht-newtonsche Flüssigkeiten zu definieren, um ein breites Spektrum von benutzerdefinierten Materialien zu simulieren. Für häufig verwendete Fluide können benutzerdefinierte Presets erstellt werden, um bei Bedarf sofort darauf zugreifen zu können.

m Mittelpunkt der Entwicklung von PreonLab steht das Versprechen von FIFTY2, eine effiziente und leistungsstarke Simulationssoftware zu entwickeln. Dazu gehört die Weiterentwicklung der Software zur Maximierung der Simulationsgeschwindigkeit bei gleichzeitiger Minimierung des Speicherbedarfs.
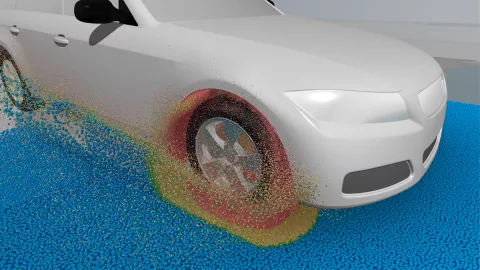
Continuous Particle Size (CPS) ist ein einzigartiger, fortschrittlicher Algorithmus zur räumlich adaptiven Partikelverfeinerung und -vergröberung. In Regionen, in denen eine hohe Präzision benötigt wird, ist häufig auch eine kleine Partikelgröße notwendig. Im Falle von Verschmutzungssimulationen könnten dies Bereiche im Radkasten eines Fahrzeugs, entlang der Oberfläche des Fahrzeugs oder um Dichtungselemente herum sein, durch die Leckagen auftreten können. Um die Gesamtzahl der Fluidpartikel und damit die Simulationszeit und den Speicherbedarf so gering wie möglich zu halten, ist eine geringere räumliche Auflösung wünschenswert. Das bedeutet, dass abseits dieser Regionen gröbere Partikel ausreichen sind. Mit CPS werden die Partikel für jeden Simulationsschritt effizient verfeinert oder vergröbert. Zusätzlich ist es möglich eine hohe Spannweite zwischen den größten und kleinsten Partikeln in den Verfeinerungsregionen zu haben. Als Resultat müssen keine Kompromisse zwischen Simulationsgenauigkeit, Simulationszeit und Speicherplatz eingegangen werden, um die bestmögliche Simulationsleistung zu erzielen. Selbst bei komplexen Geometrien ist die Verwendung von CPS und die Definition von relevanten Regionen unkompliziert. Mit der Surface Proximity Refinement Funktion können Sie Verfeinerungsregionen auf der Grundlage ihrer Nähe zu ausgewählten Festkörperoberflächen definieren. Abbildung 3 zeigt ein Beispiel für ein Surface Proximity Refinement, das nur auf das rechte Vorderrad eines Autos angewendet wird.
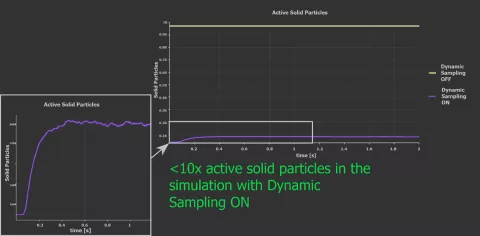
Ein weiterer wichtiger Aspekt, der dazu beiträgt, den Arbeitsspeicherbedarf einer Simulation zu reduzieren, ist die Fähigkeit von PreonLab, pro Simulationsschritt nur die erforderlichen Festkörperoberflächen zu beachten. Dynamic Sampling stellt sicher, dass in jedem Simulationsschritt nur Festkörperpartikel aktiv sind, die Fluidpartikel in ihrer Nähe haben. Auf diese Weise wird die Gesamtzahl der aktiven Festkörperpartikel und folglich auch der gesamte Speicherbedarf so gering wie möglich gehalten. Dies kann bei Verschmutzungssimulationen, die viele Festkörperpartikel enthalten, um alle Oberflächengitter (z. B. Fahrzeug- und Straßen-Geometrien) zu repräsentieren, von großem Vorteil sein. Abbildung 4 zeigt die Auswirkungen von Dynamic Sampling auf die Anzahl der aktiven Festkörperpartikel in einer Autoreifenspritzsimulation, wie sie in Abbildung 2 zu sehen ist. Bei aktiviertem Dynamic Sampling erreicht die Simulation ein Maximum von 83,5 Millionen aktiven Festkörperpartikeln, da sich die Flüssigkeit aufgrund der Spritzer ausbreitet. Ist das Dynamic Sampling hingegen ausgeschaltet, werden alle möglichen Festkörperoberflächen in der Simulationsszene als Partikel erfasst, auch solche, die weiter von der Flüssigkeit entfernt sind, was schon beim ersten Zeitschritt zu einer Gesamtzahl von fast 1 Milliarde Festkörperpartikeln führt.
Abbildung 4: Die Auswirkung von Dynamic Sampling auf die Anzahl der aktiven Festkörperteilchen in einer Simulation.
Wie bereits erwähnt, können Verschmutzungssimulationen in Bezug auf Rechenaufwand und Speicherbedarf recht anspruchsvoll sein. Dies bedeutet, dass die Simulationszeiten recht lang sein können und somit zu einer erheblichen Verlängerung der Projektdurchlaufzeiten führen.
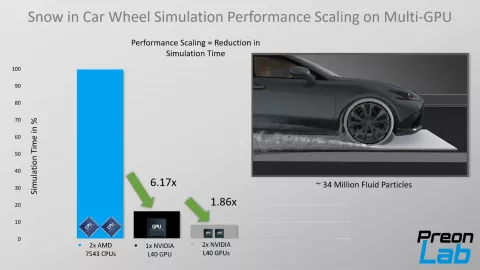
In den meisten Fällen ermöglicht das Simulieren auf GPU eine deutlich höhere Leistung pro Watt im Vergleich zur herkömmlichen Simulation auf CPUs. Folglich übertreffen High-End-GPUs auch High-End-CPUs in Bezug auf die Simulationslaufzeiten. Dies kann vielversprechend sein, um die Simulationszeit drastisch zu reduzieren. Zwar können GPUs dazu beitragen, Simulationen in einem Bruchteil der auf CPUs benötigten Zeit durchzuführen, jedoch sind sie stärker mit Beschränkungen der Speichergröße konfrontiert. Aus diesem Grund bietet PreonLab 6.1 Multi-GPU-Unterstützung, wodurch es möglich ist große Simulationsszenen auf mehrere Grafikkarten zu verteilen. Aufgrund der nahezu linearen Leistungsskalierung über mehrere GPUs profitiert der Nutzer von einer weiteren Performancesteigerung. Abbildung 5 zeigt die Leistungssteigerung, die mit der Multi-GPU Unterstützung in PreonLab 6.1 möglich ist, für eine Simulation, die die Ansammlung von Schnee im Radkasten eines Autos zeigt.
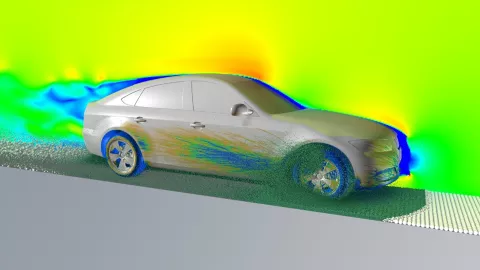
Vector Field Visualizer: Visualisierung der Luftströmung
Wie bereits in diesem Artikel erwähnt, hat die Aerodynamik des Fahrzeugs einen erheblichen Einfluss auf das Verschmutzungsmuster. In der Tat ist die Berücksichtigung instationärer Luftströmungen von wesentlicher Bedeutung, insbesondere für Simulationen, die darauf abzielen, Verschmutzungsmuster an den Seitenscheiben aufgrund von Überströmungen der A-Säule oder am Fahrzeugheck aufgrund von Spritzern zu erfassen. PreonLab unterstützt sowohl den Import stationärer als auch instationärer Luftströmungen per CSV-Format oder EnSight Gold-Format. Die importierte Luftströmung kann dann einfach mit Hilfe eines Vector Field Visualizers dargestellt werden, um ein korrektes Setup sicherzustellen, wie es in Video 4 zu sehen ist.
Video 4: Visualisierung eines instationären Strömungsfelds durch einen Vector Field Visualizer in PreonLab.
Wetting Sensor: Benetzungssensor
Der Wetting Sensor misst die aktuelle sowie die Gesamtmenge der Benetzung eines beliebigen Festkörpers, dem er zugewiesen ist. Ein Sensor kann mit nur wenigen Klicks mit jedem Solid-Mesh in der Simulation verbunden werden. Der Sensor misst und visualisiert, wo und wie viel Flüssigkeit mit einem festen Objekt in Berührung gekommen ist. Diese Funktion ist für Verschmutzungssimulationen besonders wertvoll, da sie die Analyse von Verschmutzungsmustern auf Fahrzeugoberflächen und die Identifizierung kritischer Stellen, die anfällig für Verschmutzung oder Leckagen sind, vereinfacht.
Abbildung 5 zeigt, wie das durch einen Reifenspritzer verursachte Verschmutzungsmuster mit einem an der Seite eines Fahrzeugs angeschlossenen Wetting Sensor visualisiert wird.
Pathlines Sensor für Bahnlinien
Bahnlinien können bei der Ergebnisanalyse von Verschmutzungssimulationen sehr nützlich sein. In PreonLab visualisiert die Funktion die von einem einzelnen Partikel zurückgelegte Flugbahn sowie die Veränderung seiner Geschwindigkeit über die Zeit. Der Benutzer muss einen Zeitbereich und eine Region angeben, um die Partikel auszuwählen, für die Trajektorien dargestellt werden sollen. Die Region kann auch in Bezug auf ihre Nähe zu einer bestimmten geometrischen Oberfläche in der Simulation definiert werden. Die Bahnlinien können mit Pfeilen visualisiert werden, die Strömungsrichtung der Partikel anzeigen, wie es in Video 5 zu sehen ist.
Video 5: Bahnlinien für ausgewählte Partikel in einer Schneesimulation, die mithilfe des Pathlines Sensors visualisiert werden.tion.
Fotorealistisches Rendering
Schließlich ist PreonLab mit Material-Presets für häufig verwendete Flüssigkeiten und Festkörper sowie einem leistungsstarken integrierten, auf Raytracing basierenden Rendering-Werkzeug namens PreonRenderer ausgestattet. Mit nur wenigen Klicks können Anwender beeindruckende Bilder und Videos erstellen und mit anderen teilen. Dies kann dabei helfen, die Fahrzeugdesigns und Verschmutzungsmuster besser zu analysieren und auf intuitive Weise mehr Erkenntnisse zu gewinnen.
Die Verschmutzung von Fahrzeugen spielt eine wichtige Rolle bei verschiedenen Sicherheitsaspekten des Fahrens sowie bei der Positionierung von Sensoren und Kameras für das autonome Fahren. Es gibt zahlreiche Faktoren, die das Verschmutzungsmuster auf Fahrzeugoberflächen beeinflussen und es ist nicht möglich, alle möglichen Kombinationen während der experimentellen Tests für jeden Prototyp zu berücksichtigen. Dank der Fähigkeit von PreonLab, ein breites Spektrum von Flüssigkeiten zu simulieren, in Kombination mit einer Vielzahl innovativer und einfach zu bedienender Funktionen, ist es möglich, wertvolle Erkenntnisse in den frühen Phasen des Fahrzeugdesigns zu gewinnen und damit physikalische Tests zu ergänzen. Darüber hinaus können der gitterfreie Ansatz von PreonLab, der Fokus auf Rechenperformance sowie die Unterstützung mehrerer Hardwareplattformen die Projektdurchlaufzeiten und -kosten für Fahrzeugverschmutzungssimulationen erheblich reduzieren.
Schauen Sie sich unser neustes Webinar zum Thema Fahrzeugverschmutzungssimulationen an.
Die Verschmutzung von Fahrzeugen und Sensoren wird zu einem immer wichtigeren Aspekt des Fahrzeugdesigns. Der Schwerpunkt verlagert sich eindeutig von der reinen Ästhetik zu Herausforderungen im Zusammenhang mit der Verbesserung der Sicherheit und der Kostensenkung.