4 8 adas/ad
D E T E C T , A N A LY Z E A N D C O M M A N D !
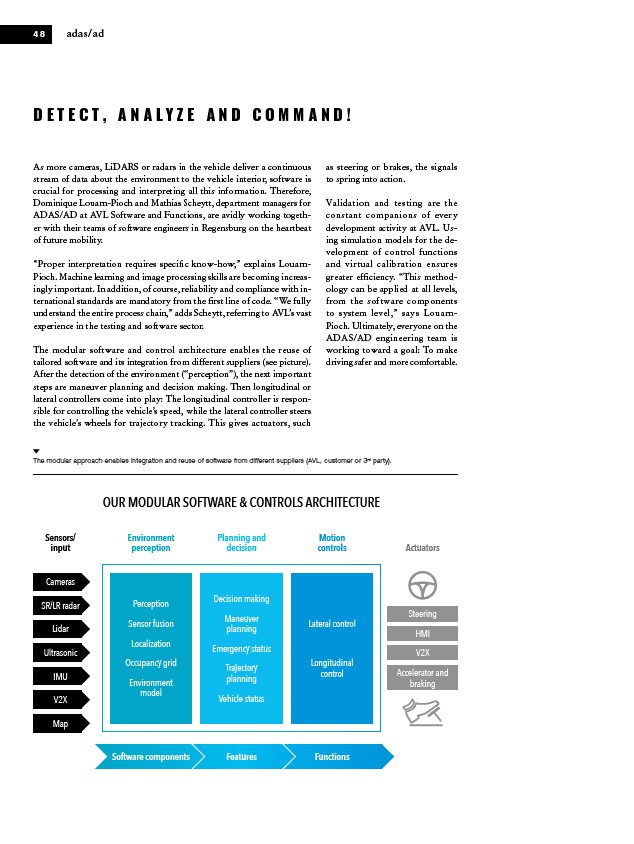
as steering or brakes, the signals
to spring into action.
Validation and testing are the
constant companions of every
development activity at AVL. Using
simulation models for the development
of control functions
and virtual calibration ensures
greater efficiency. “This methodology
can be applied at all levels,
from the software components
to system level,” says Louarn-
Pioch. Ultimately, everyone on the
ADAS/AD engineering team is
working toward a goal: To make
driving safer and more comfortable.
As more cameras, LiDARS or radars in the vehicle deliver a continuous
stream of data about the environment to the vehicle interior, software is
crucial for processing and interpreting all this information. Therefore,
Dominique Louarn-Pioch and Mathias Scheytt, department managers for
ADAS/AD at AVL Software and Functions, are avidly working together
with their teams of software engineers in Regensburg on the heartbeat
of future mobility.
“Proper interpretation requires specific know-how,” explains Louarn-
Pioch. Machine learning and image processing skills are becoming increasingly
important. In addition, of course, reliability and compliance with international
standards are mandatory from the first line of code. “We fully
understand the entire process chain,” adds Scheytt, referring to AVL’s vast
experience in the testing and software sector.
The modular software and control architecture enables the reuse of
tailored software and its integration from different suppliers (see picture).
After the detection of the environment (“perception”), the next important
steps are maneuver planning and decision making. Then longitudinal or
lateral controllers come into play: The longitudinal controller is responsible
for controlling the vehicle’s speed, while the lateral controller steers
the vehicle’s wheels for trajectory tracking. This gives actuators, such
The modular approach enables integration and reuse of software from different suppliers (AVL, customer or 3rd party).
OUR MODULAR SOFTWARE & CONTROLS ARCHITECTURE
Sensors/
input
Cameras
SR/LR radar
Lidar
Ultrasonic
IMU
V2X
Map
Perception
Sensor fusion
Localization
Occupancy grid
Environment
model
Decision making
Maneuver
planning
Emergency status
Trajectory
planning
Vehicle status
Lateral control
Longitudinal
control
Steering
HMI
V2X
Accelerator and
braking
Environment
perception
Planning and
decision
Motion
controls
Actuators
Software components Features Functions