Testing software for automated driving is a challenge in many aspects. After all, autonomous vehicles must be equally safe for passengers and all other traffic participants. An enormous amount of testing is required to ensure this safety. It is important to consider that if changes are made to the software, the test series starts all over again. Such a massive testing volume can simply no longer be managed efficiently with physical tests and real prototypes. A paradigm shift towards virtualization is the logical next step.
Efficient Test Coverage
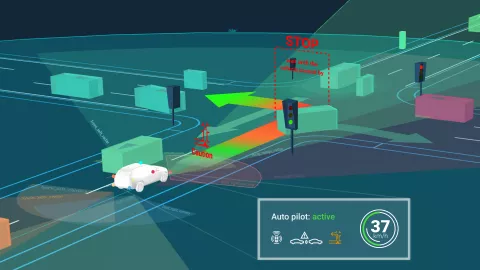
Scenario-based testing focuses on critical traffic situations to validate the safety of ADAS/AD software.
Cost & Time Savings
Simulation is cost-efficient and can be executed highly parallelized enabling high test coverage and fast development cycles to reduce time-to-market without breaking the budget.
Reproducability
Virtual test scenarios can be re-run in exactly the same way, enabling the unbiased comparison between different versions of ADAS/AD software.
Sustainability
Reduce your environmental footprint by using fewer physical prototypes.
The typical workflow with Scenario Simulator can be summarized in the following steps:
- Prepare a virtual prototype for continuous integration of the ADAS/AD software.
- Import test scenarios and set up parameter variations.
- Define post-processing actions and safety metrics.
- Test and debug the simulation setup with the “live” mode.
- Run highly parallelized simulations – locally or in the cloud.
- Monitor and compare your runs in aggregated dashboards.
- Analyze failed tests in detail with the 3d result replay.
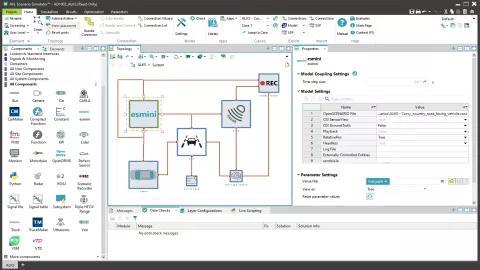
Purpose-Driven Virtual Prototypes
Scenario Simulator has open interfaces to integrate any simulation models or tools into a co-simulation. It includes ground truth sensor models and high-performance vehicle dynamics models. ADAS/AD software can be integrated via standardized or custom interfaces like FMI, ROS1/2, Python, TCP, UDP. Optimize you co-simulation with the built-in performance analysis tool for cost-efficient scalability.
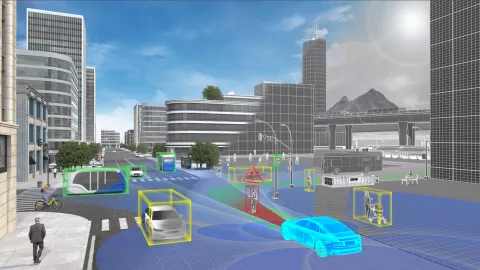
High-Performance Sensor Models
The included sensor models are optimized for planning and controls testing, which means they support scaling to millions of closed-loop tests, even with many sensors on a virtual prototype. The sensors apply different effects directly on the ground truth of the simulated scenario and therefore require no expensive GPU resources. Available sensor effects are geometrical (coordinate transformation, field of view, range, occlusion), phenomenological (e.g. distance-based visibility reduction in difficult weather conditions), statistical (noise, ghost objects, false negatives, …). The sensor data is structured according to the ASAM OSI® standard.
Large-Scale Scenario-Based Testing Based on ASAM OpenSCENARIO® Standard
Thanks to an outstanding support of the ASAM OpenSCENARIO® standard, Scenario Simulator can import test definitions from various sources and allows users to configure parameter variations. Simulations run parallelized on workstations and can be scaled to many workers in a Kubernetes cloud environment – supported by a powerful parameter and test case management.
Result Analysis on Two Levels – From Dashboard to Scenario Replay
Result analysis takes place on two levels. The run history provides an aggregated view on all executed simulations based on test parameters and KPIs/safety metrics allowing for a quick high-level comparison of different ADAS/AD software versions. It also allows to cluster and filter failed tests for an efficient detail analysis of individual tests. The Scenario Replay feature enables a 3D playback of recorded ASAM OSI® data as well as timeseries data. This allows analysis from all angles and different sensor data streams to investigate the exact cause of a failed test and provides important debugging information for the ADAS/AD developers. Based on this information, they can improve the handling of the safety-critical situation in the next version of the ADAS/AD software.
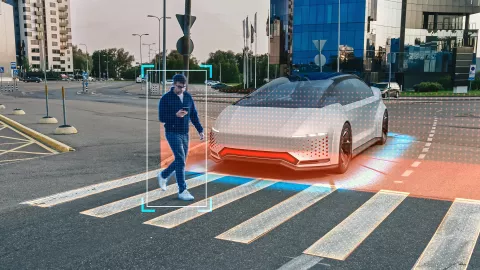
What will the vehicle of the future look like? It will be electrified in some form, sure. But most importantly, it will be equipped with a variety of advanced driver assistance systems (ADAS), and the driver will be able to fully rely on the vehicle through autonomous driving (AD).
The biggest challenge is to gain drivers' trust in the technology by...
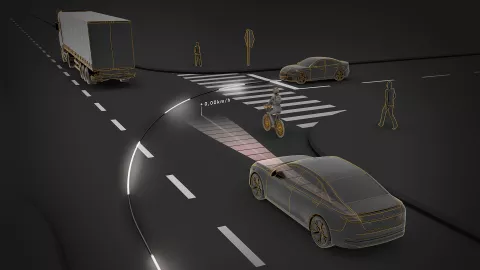
How can you check whether an automated driving function is safe in all situations? To answer this question with certainty, billions of test kilometers would be required. A more efficient and sustainable solution is scenario-based testing.
SCENIUS is a holistic solution for scenario-based ADAS and AD safety testing and validation.
The new AVL Scenario Simulator™ is a cost-optimized solution for fully automated, large-scale ADAS/AD testing. Build the optimal virtual prototype for each test purpose.

Our simulation expert will give you a free training where he will walk you through all the typical steps necessary to integrate and test an Advanced Driver Assistance System (ADAS) or Automated Driving (AD) software in a virtual environment.
Scenario-based testing is established as an efficient method to test critical traffic situations in a reproducible way. The AVL SCENIUS™ toolchain for scenario-based testing ensures end-to-end consistency and traceability, from the requirements to test reports, enabling a thorough safety argumentation and type approval process.

Discover how AVL and AVES Reality are revolutionizing the verification and validation of automated driving systems in urban areas.